В этом случае задача синтеза
В этом случае задача синтеза
Автоматизация систем теплогазоснабжения и вентиляции - И.И. Капцов
 47
47 
Динамические
характеристики объектов, как было указано ранее, могут быть представлены
некоторыми типовыми зависимостями. Это позволяет разнообразие законов
регулирования свести к нескольким типовым (стандартным) законам, которые в
большинстве случаев используются на практике. В этом случае задача синтеза САР
сводится к выбору подходящего
регулятора
с типовым законом регулирования и определению оптимальных параметров его
настройки.
В практике
автоматизации технологических объектов в большинстве случаев применяются
регуляторы со следующими законами регулирования.
Пропорциональные
регуляторы (П-
регуляторы). Данные регуляторы перемещают регулирующий орган пропорционально
отклонению регулируемой величины от заданного значения:
П- регулятор соответствует безынерционному звену,
коэффициент которого равен отношению перемещения регулирующего органа к
отклонению управляемой величины. Пропорционально регуляторы позволяют устойчиво
регулировать практически все промышленные объекты. Однако при различных
нагрузках управляемого объекта П — регуляторы
поддерживают управляемый параметр на различных значениях. Это связано с тем,
что перемещение регулирующего органа в положение, соответствующее изменившейся
нагрузке, может быть произведено только за счет изменения управляемой величины.
Данное явление называется остаточной неравномерностью
или статизмом.
По своим динамическим свойствам И-регулятор подобен
интегрирующему звену и
может устойчиво работать только с объектами, обладающими самовыравниванием.
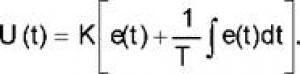
 Пропорционально -интегральныерегуляторы (ПИ -регуляторы). Эти регуляторы называются также изодромными регуляторами. ПИ -
Пропорционально -интегральныерегуляторы (ПИ -регуляторы). Эти регуляторы называются также изодромными регуляторами. ПИ -
регуляторы перемещают регулирующий орган пропорционально сумме отклонения и
интегралу от отклонения управляемой величины. Уравнение ПИ- регулятора имеет
следующий вид: